报警盒上电后,需要添加探测器,才能完成设备布撤防,无线报警盒和无线报警按钮通过无线报警按钮的序列号进行关联(需通过4200客户端操作)。
1.打开iVMS-4200 客户端软件中,进入“设备管理”界面,在“管理的设备”中单击选中报警盒,单击“远程配置-输入配置-防区”,进入防区参数配置界面。
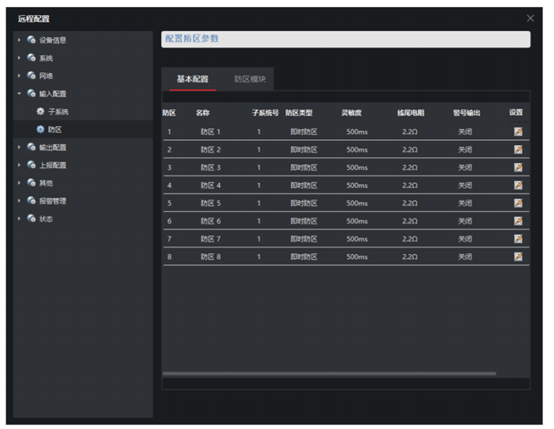
2.选择一个未添加探测器的防区,单击 ,进入防区参数设置对话框。
,进入防区参数设置对话框。
3.单击“防区关联探测器”,输入探测器序列号。
4.单击“注册”完成添加。


报警盒上电后,需要添加探测器,才能完成设备布撤防,无线报警盒和无线报警按钮通过无线报警按钮的序列号进行关联(需通过4200客户端操作)。
1.打开iVMS-4200 客户端软件中,进入“设备管理”界面,在“管理的设备”中单击选中报警盒,单击“远程配置-输入配置-防区”,进入防区参数配置界面。
2.选择一个未添加探测器的防区,单击,进入防区参数设置对话框。
3.单击“防区关联探测器”,输入探测器序列号。
4.单击“注册”完成添加。
可以通过4200客户端设置事件卡号联动
本内容适用于如下型号:
DS-K2601/2602/2604 普通门禁系列
DS-K3M200 通道门禁系列
DS-K2602X-AI 通道门禁系列
DS-K1T105EF/MF/CF 普通一体机系列
DS-K1T200/201EF/MF/CF 普通一体机系列
DS-K1T300/301EF/MF/CF 普通一体机系列
DS-K1T500/501SF 视频门禁一体机系列
DS-K1T604/605/606/607/671 明眸一体机系列
以开门超时报警,联动继电器输出为例,2604接线如下:
一 、接线:
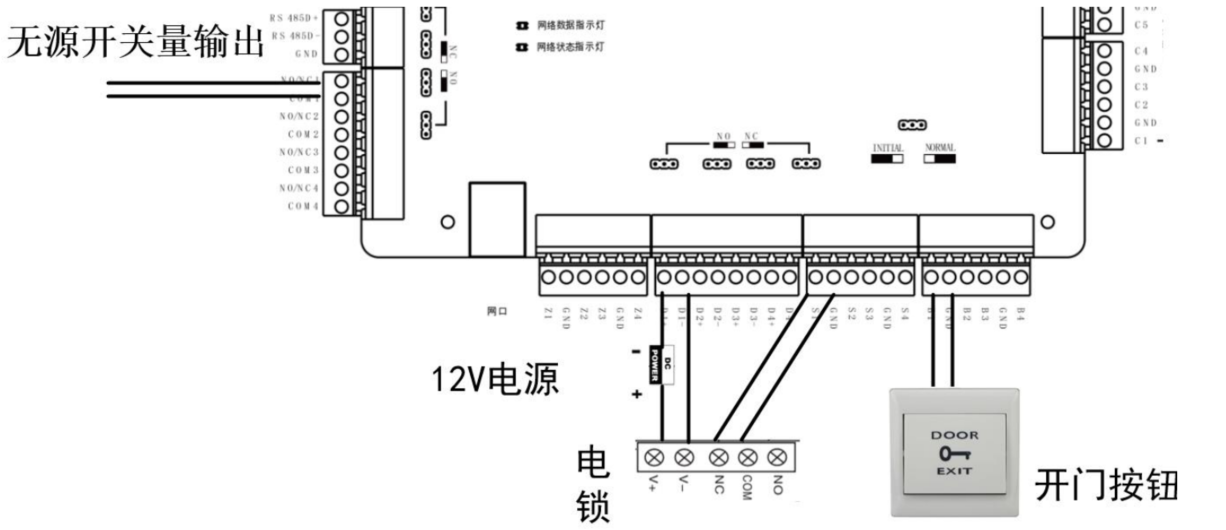
说明:报警输出信号是无源开关量,外接警号需要串接电源。NC/NO 跳冒可以自行选择。
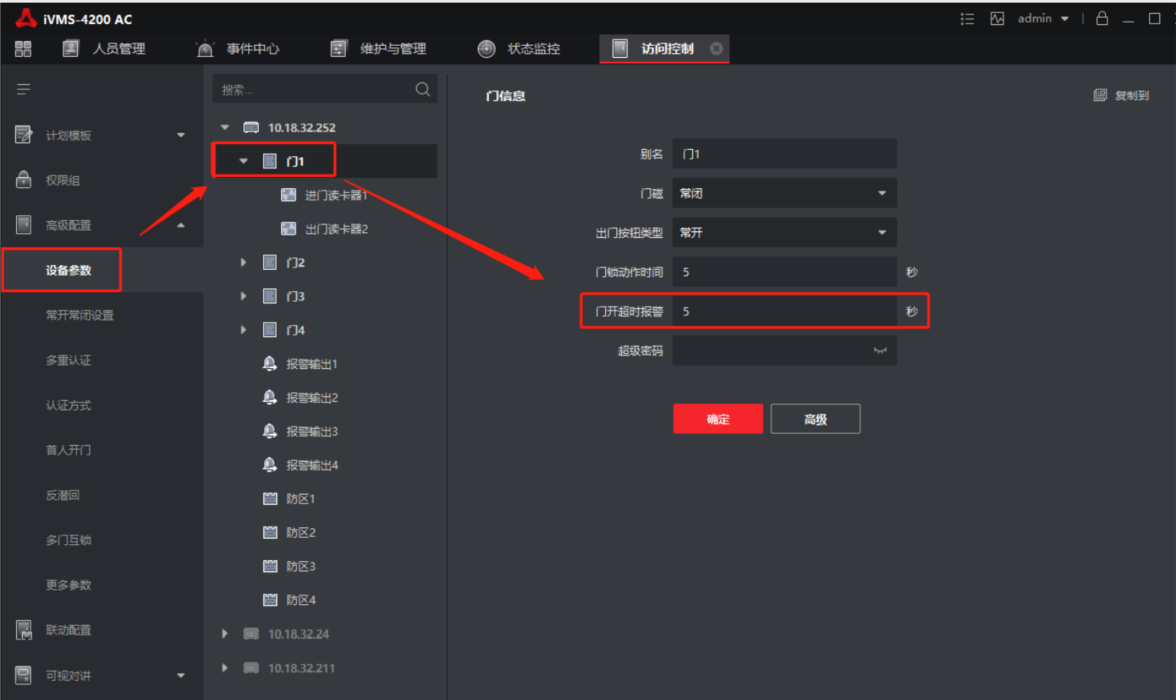
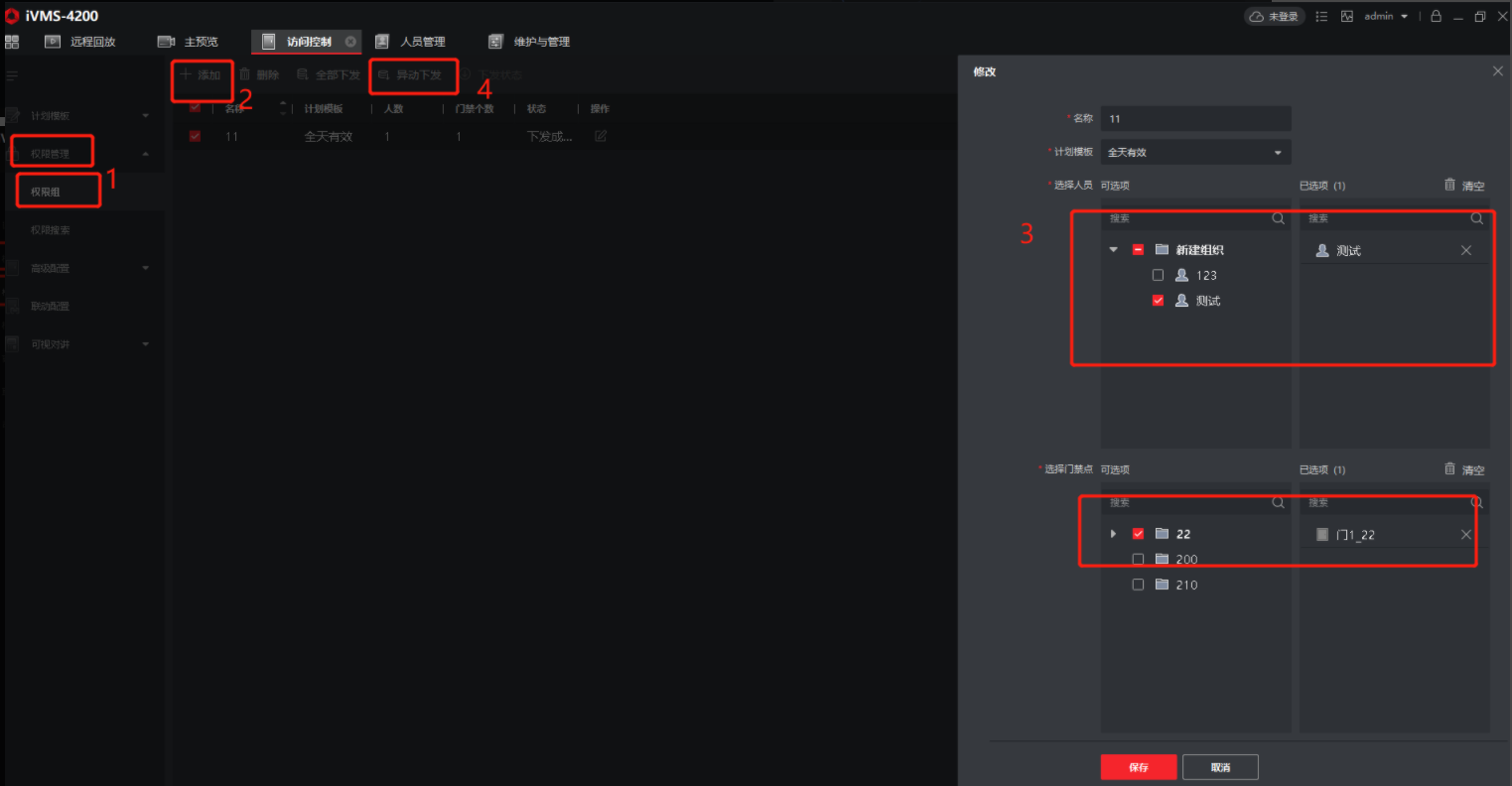
二、4200配置:
门参数设置
1、选择访问控制—高级设置—设备参数,选择门1,修改“门开门超时报警”时间,保存。
2、联动配置
(1)配置报警输出开启 ,选择访问控制—联动配置,选中设备点击添加
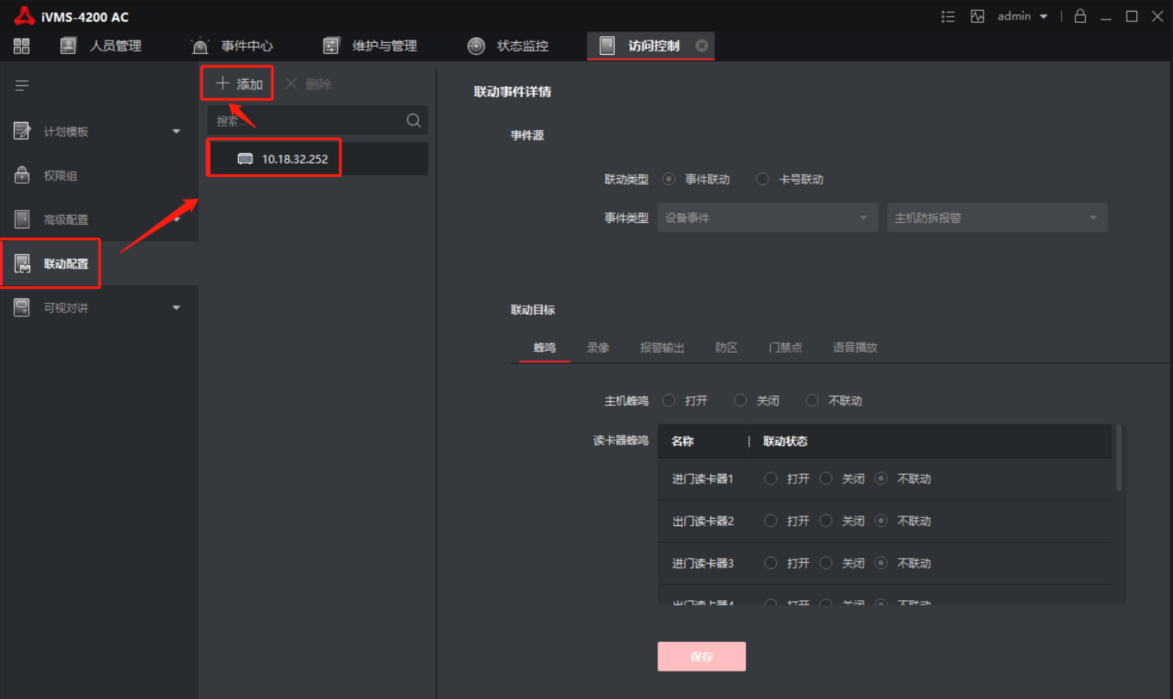
(2)联动事件类型配置
事件源
联动类型选择:事件联动;
事件类型:门事件
门磁打开超时 门禁点:门1

(3)配置报警输出关闭:
事件源 联动类型选择:事件联动;
事件类型:门事件 门磁正常关闭
门禁点:门 1
联动目标
选择报警输出:报警输出 1 “关闭”
点击保存。

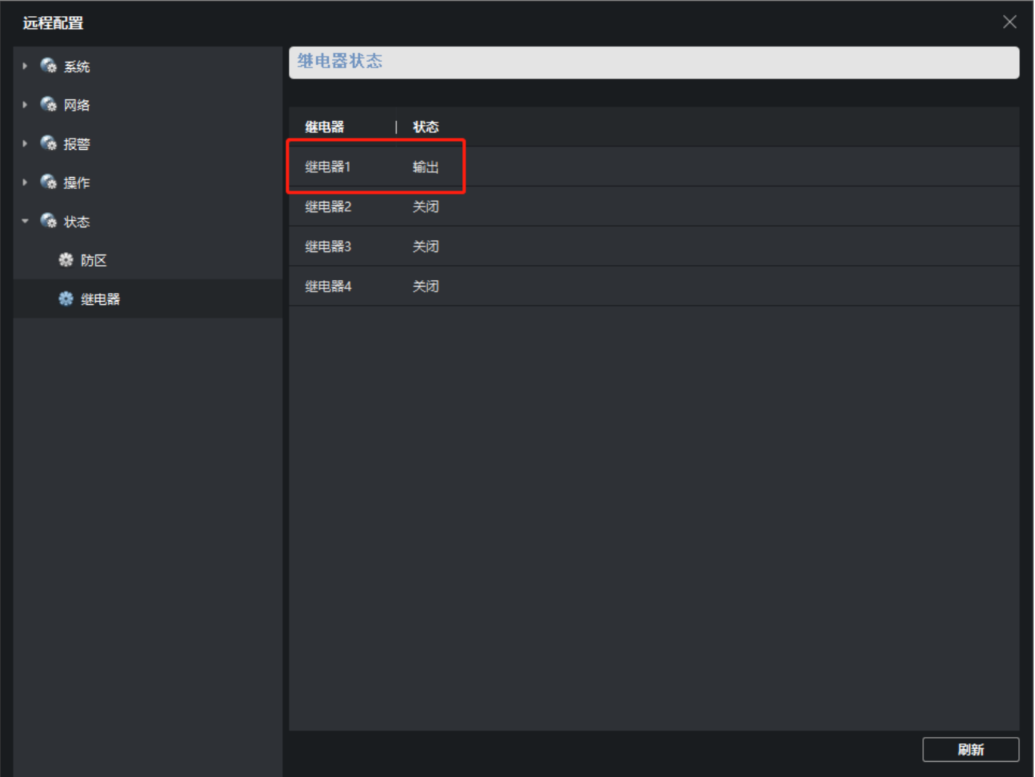
三、效果验证
1、门打开未及时关门,上传“门磁打开超时”事件

2、查看继电器 1 的状态为:输出
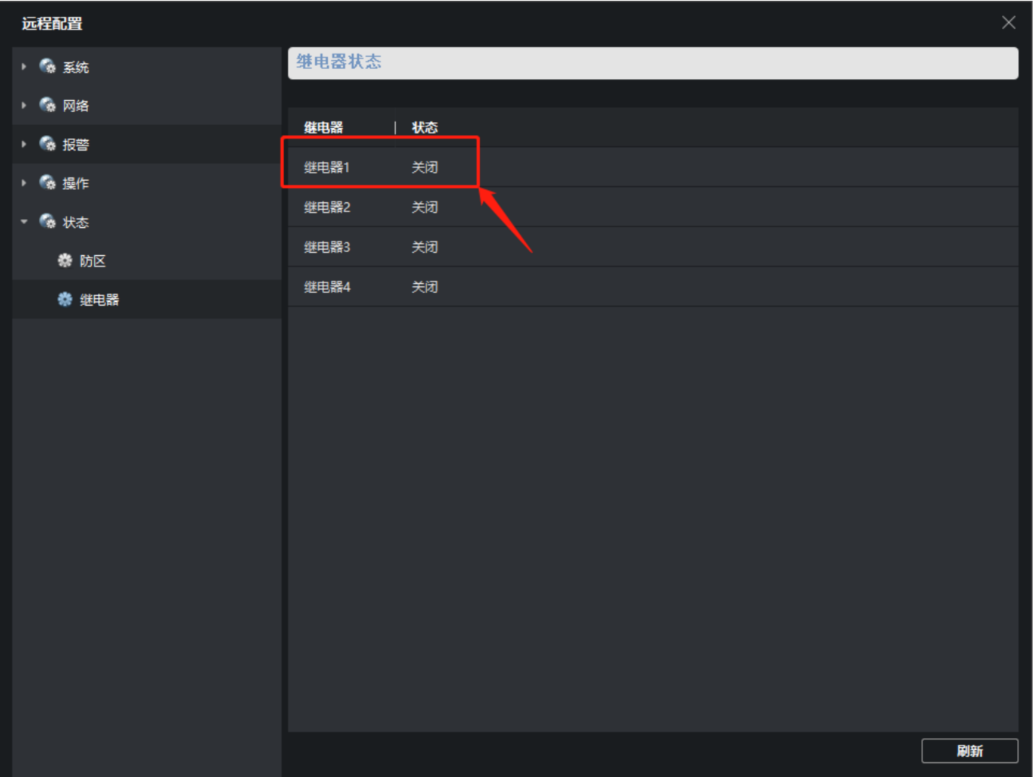
3、关门后,上传事件:门磁正常关门

4、查看继电器 1 的状态为:关闭
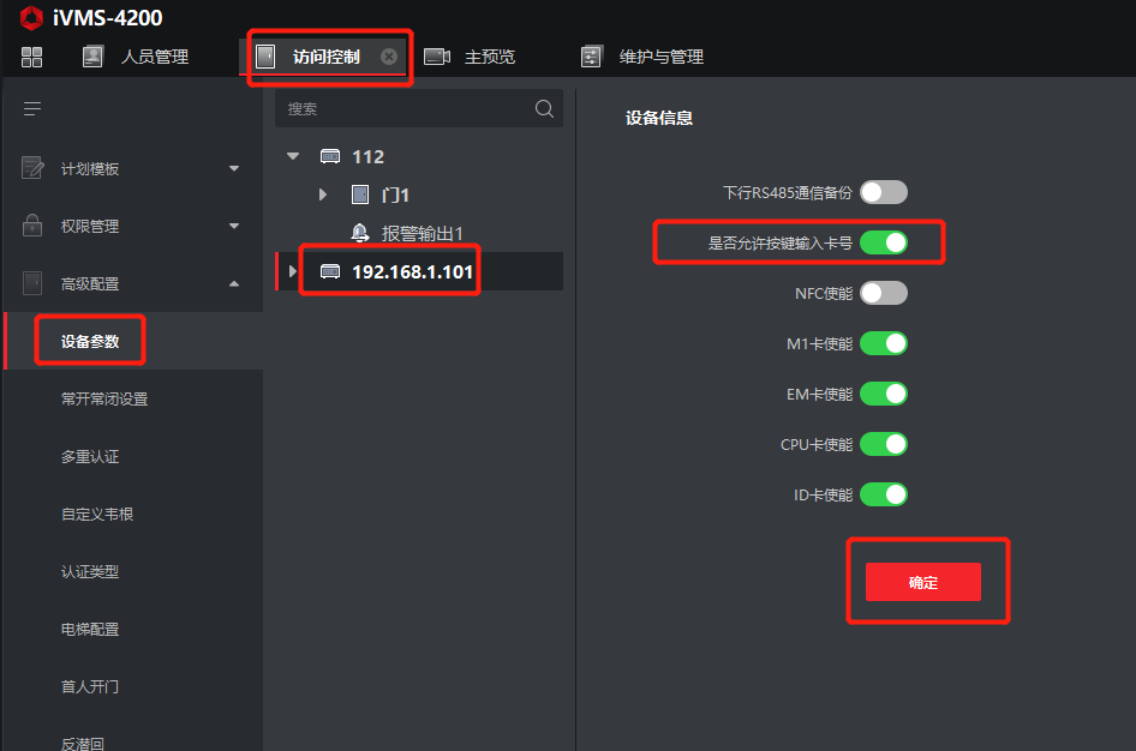
操作方法:
1、门禁主机开启“是否允许按键输入卡号”功能,需要门禁主机支持;
2、4200人员管理里面添加卡号信息
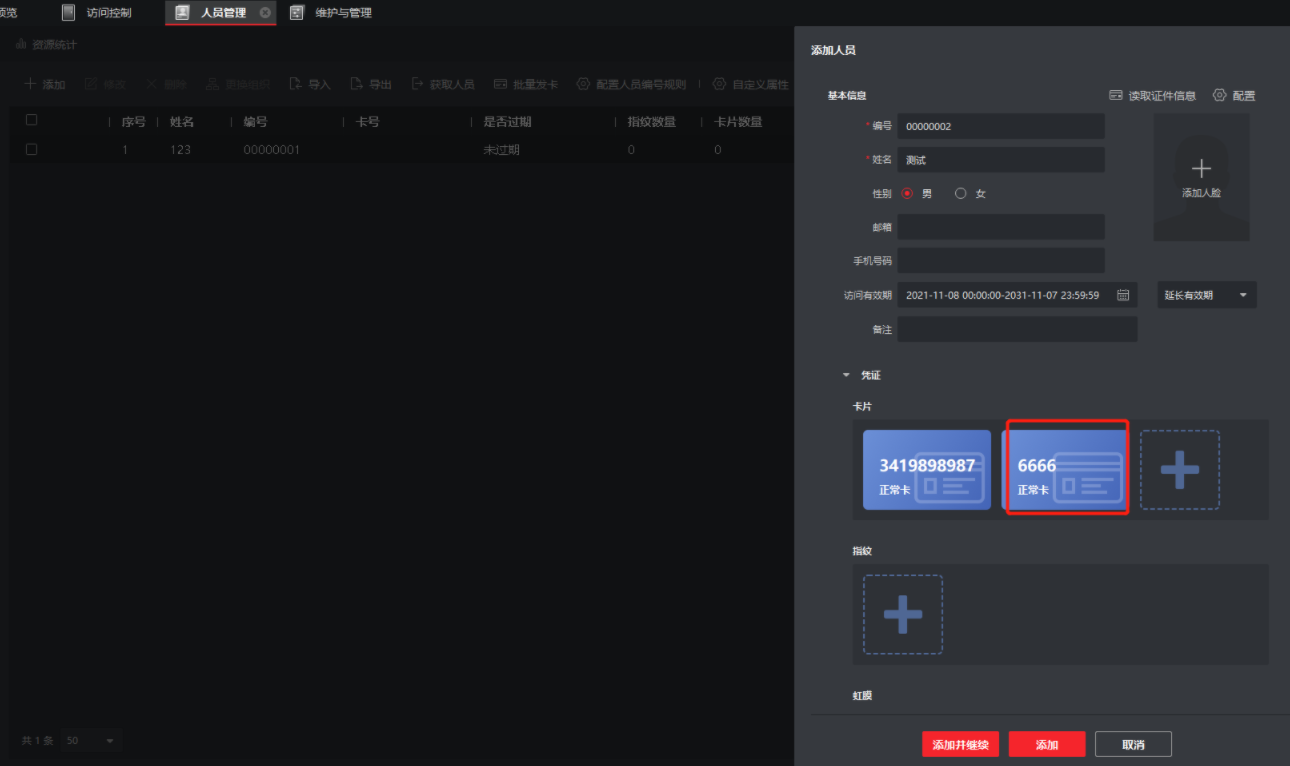
3、将卡号下发到门禁主机上
4、确保读卡器支持刷卡验证方式,读卡器按密码+#号,测试开门。

故障现象:
门禁接读卡器刷卡开门正常,设置超级密码之后,键盘按键没有反应?
解决方法:
核实读卡器型号,如果是型号带ACK的读卡器,需要第五位拨码为on,重启读卡器才能使用键盘,不拨码的话密级提高后,按键就会被屏蔽。
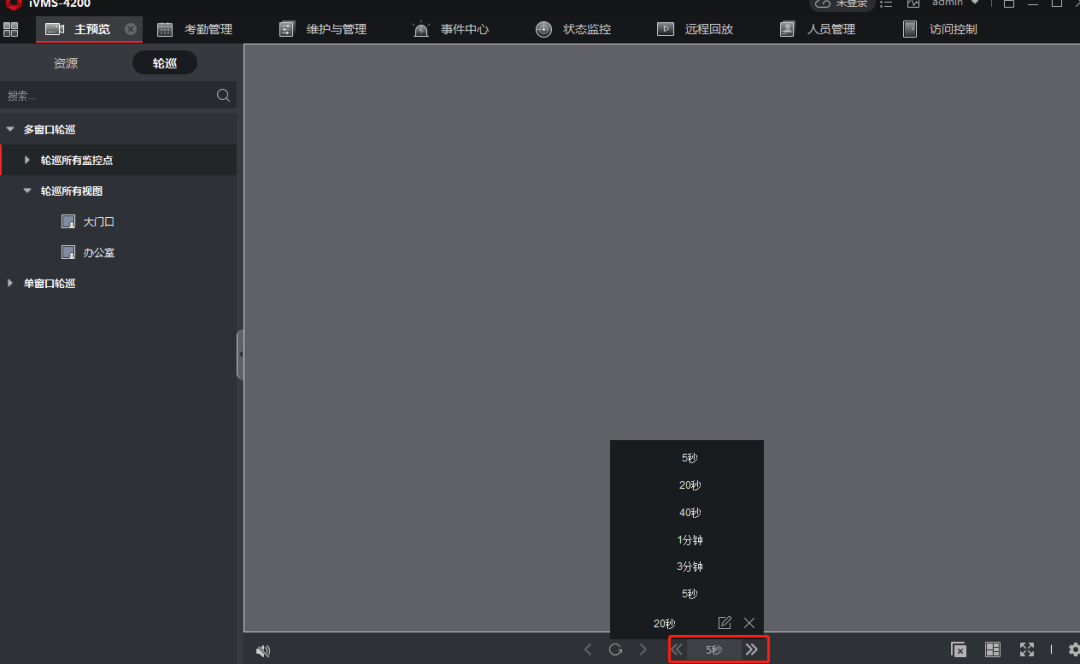
轮巡预览是指让监控点画面按设置的时间和方式轮巡播放的功能。
在摄像机数量比较多时可以通过画面轮巡实现高效监控。
单窗口分组轮巡
适用场景:自定义选择软件中添加的监控画面,单窗口预览轮巡。
操作步骤:
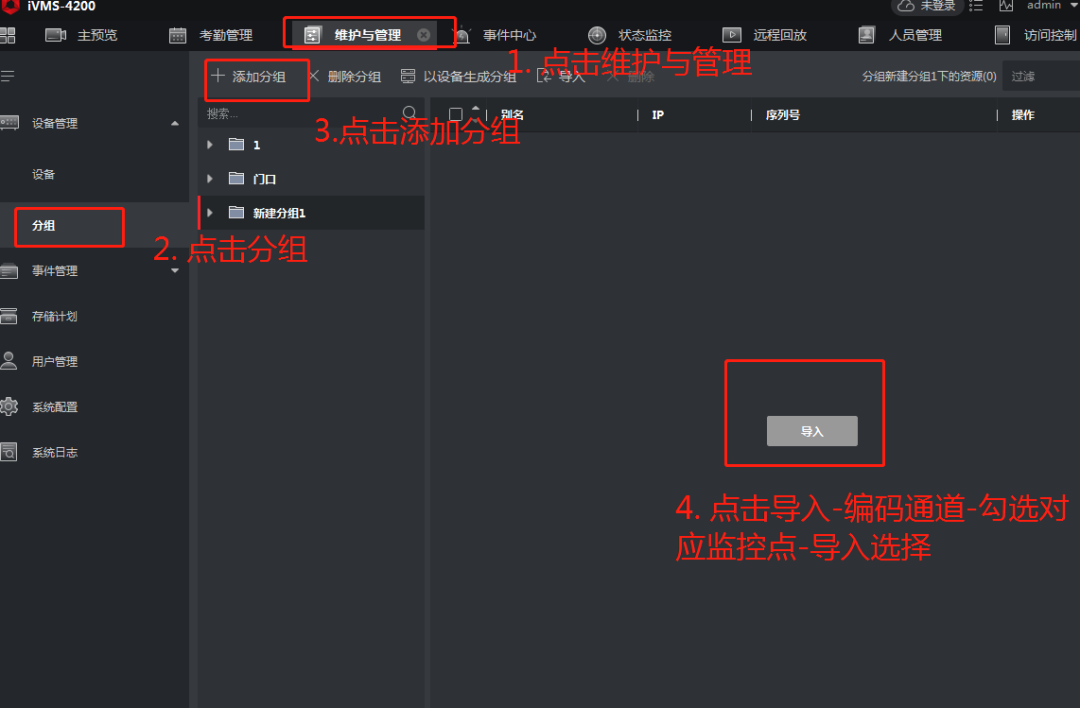
(1) 添加分组:维护与管理-分组-添加分组-导入-编码通道-勾选需要加入的监控点-导入选择;
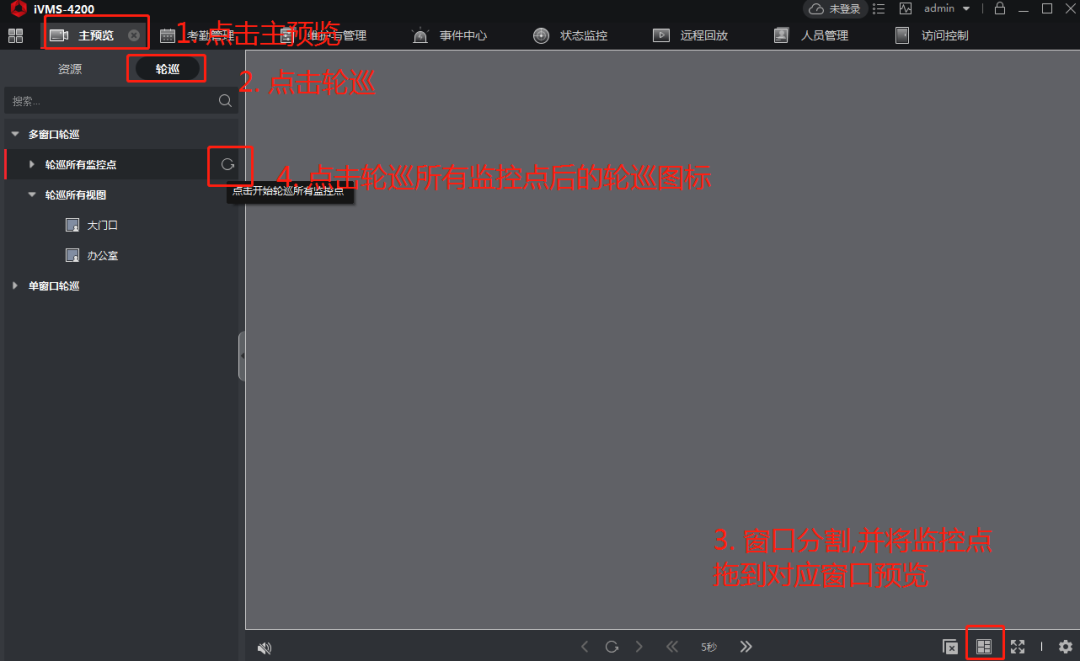
(2) 点击主预览-轮巡-选中窗口-点击对应分组后的轮巡图标。

多窗口轮巡
1、轮巡所有监控点
功能介绍:可以实现快速多窗口同步轮巡。
操作步骤:主预览-轮巡-窗口分割-点击轮巡所有监控点后的轮巡图标。
2、自定义视图轮巡
适用场景:自定义设置多个视图,让视图按顺序轮巡显示。
操作步骤:
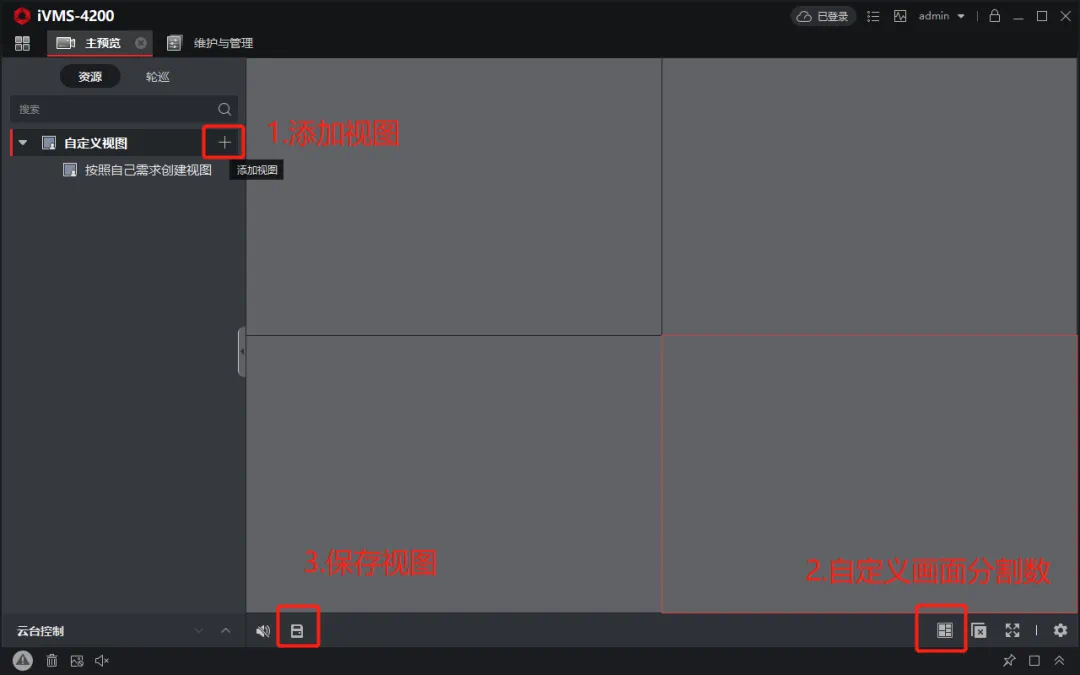
(1) 添加自定义视图
主预览-资源-点击自定义视图后的加号添加视图-窗口分割并将监控点拖到对应窗口预览-保存视图;
(2) 轮巡所有自定义视图
主预览-轮巡-点击轮巡所有视图后的轮巡图标。

轮巡时间设置
客户端下方可设置轮巡时间
注:默认轮巡时间20s。轮巡中无法设置轮巡时间,建议关闭轮巡,设置好轮巡时间再重新开启轮巡。
以NVR5832-4KS2 V4.0版本为例
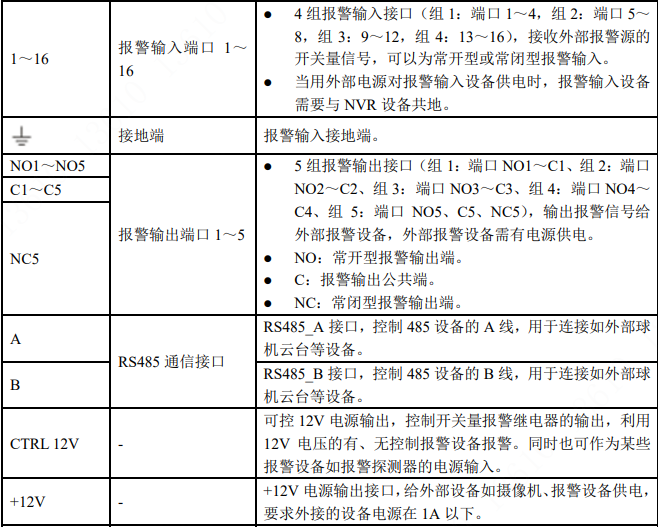
报警输入接线
报警输入端口用于接收外部报警源的开关信号,支持常开型和常闭型报警输入,报警输入接口的连接方法如下:报警输入设备的正极(+端)接入设备的报警输入端口(ALARM1-ALERM16), 报警输入设备的负极(- 端)接入设备的接地端。
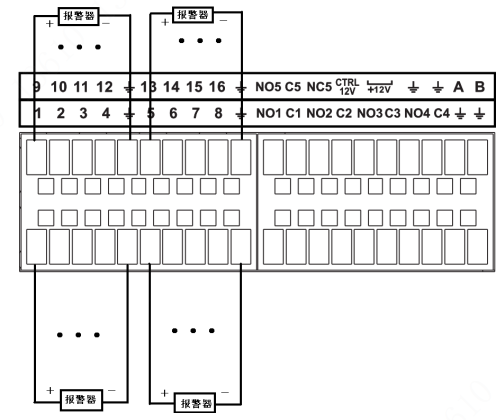
注:
1、报警器的接地端与设备接地端连接,可使用接口上的任意一个GNG
2、报警器的NC端接到设备报警输入端ALARM
3、用外部电源对报警输入设备供电时,报警输入设备需要与设备共地
4、报警输入电压范围0-3.3V,无电流,为高低电平
报警输入设置
登录本地界面,在预览界面右键选择主菜单,主菜单界面选择【报警设置】>【报警输入】,单击报警事件页签,启用设置;设置对应通道本地报警后,当报警信号通过报警输入端口传输至设备时,系统将执行报警联动动作(如屏幕提示、蜂鸣、对应通道录像及云台联动、联动抓图、报警输出等)

报警输出接线
本机共有四组常开联动输出(NO1 C1,NO2 C2,NO3 C3,NO4 C4),以及一组常开、常闭联动输出(NO5 C5 NC5),在只用开关量输出时只接入NO及COM口即可。如需接入负载可从电源输出接口接入公共端COM口,给外部设备如摄像机、报警设备供电,要求外接的设备电源在1A 以下。功率较大设备通过外接继电器进行级联控制,如下图:
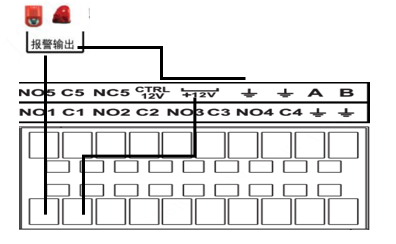
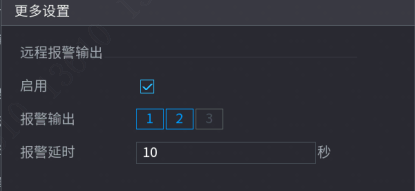
报警输出设置
设置设备的报警端口输出模式,包括自动、手动和关闭。
步骤:
登录本地界面,在预览界面单击鼠标右键,选择“主菜单”,在主菜单界面,选择【报警设置】-【报警输出】
自动:表示仅当触发报警事件时,报警设备产生报警。
手动:表示报警设备一直处于报警状态。
关闭:表示不启用报警输出功能
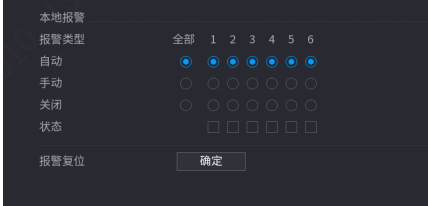
可通过设置无硬盘、动态检测、视频丢失、视频遮挡、网络断线、外部报警输入等控制对应通道报警输出和报警延时。
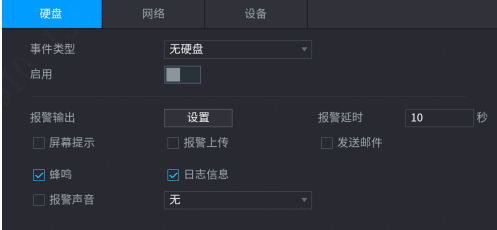

默认报警延时10秒,可设置成1-300秒
以HP笔记本为例(采用NVIDIA 4050显卡)
检查系统更新
打开【设置】,选择【Windows更新】,点击【检查更新】

设置电源高性能
系统右下角通知区域中右键点击【电源图标】打开,将电源模式修改为【最佳性能】

显卡设置
因显卡差异,部分设置若没有相关选项,不需要设置
本文以4050显卡为例
a.【右键】点击桌面空白处,选择【NVIDIA控制面板】,选择【管理3D设置】—OpenGL渲染GPU更改【GeForce RTX 4050】—三重缓冲更改【开】—低延迟模式更改【超高】
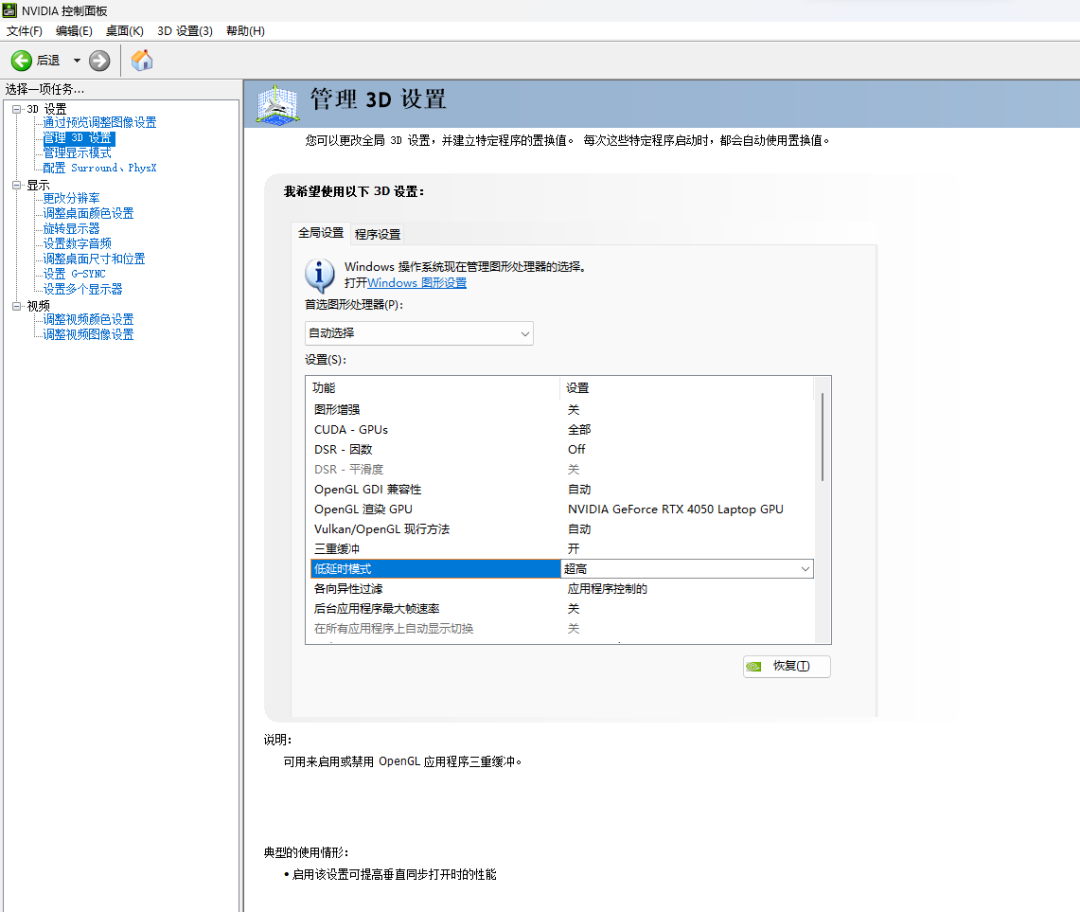
b.电源管理模式更改【最高性能优先】—首选刷新率更改【最高可用】—【应用】

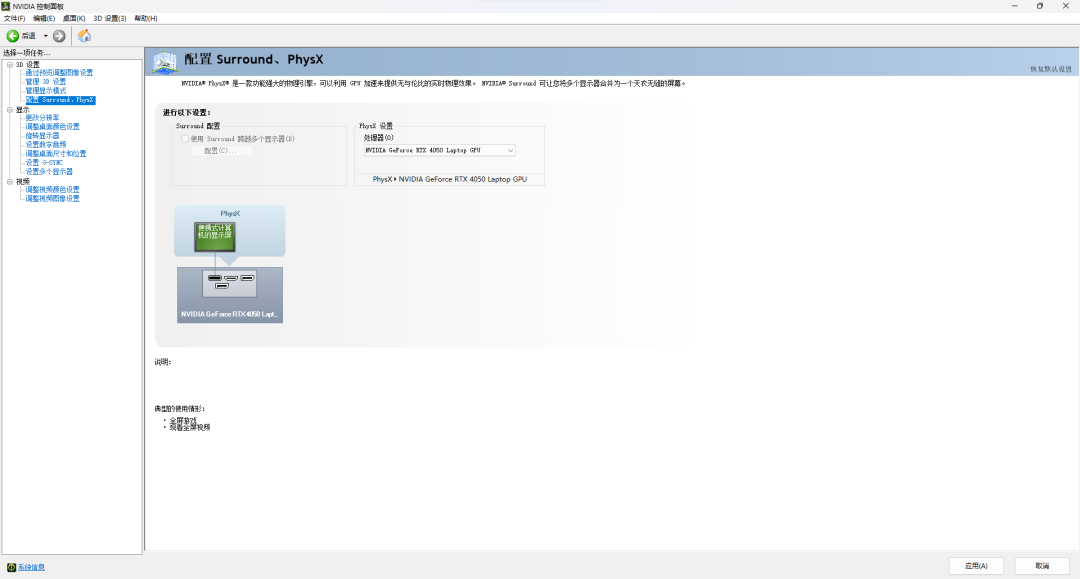
c.选择【配置Surround,PhysX】
PhysX设置更改【GeForce GTX4050】点击【应用】
添加游戏文件高性能
打开【设置】,选择【系统】-【屏幕】-【显示卡】,选择指定游戏后,点击【选项】,设置为【高性能】即可

关闭游戏模式
选择【游戏】-【游戏模式】,设置为【关闭】

修改GeForce Experience设置
打开软件GeForce Experience,将【游戏内覆盖】、【Whisper mode】、【Battery boot】设置为关闭

OMEN Gaming Hub
开启显卡直连(部分机型支持)
打开【OMEN Gaming Hub】,选择【OMEN16】-【显卡切换器】选择【仅限NVIDIA GPU】;提示重启点击【立即重新启动】即可

开启狂暴模式(部分机型支持)
打开【OMEN Gaming Hub】选择【性能控制】选择【狂暴】,温度控制选择【手动】,系统风扇转速选择【最高】

注:此功能仅部分机型支持;开启狂暴模式温度会提高,建议开启时将风扇转速调节至最大,帮助散热稳定性能
目前只有Windows 11系统会根据需要动态地将任务分配给这些大小核心,从而在系统运行过程中提供出色的性能及能耗表现。
另外,由于部分早期游戏或应用对多核的优化不充分,可能会出现一核有难多核围观的情况。
对此,我们在等待软件补丁更新的同时,可以试着关闭处理器的小核心来提升软件兼容性。
部分搭载Intel 12/13代酷睿处理器的主板可通过BIOS来关闭小核心,从而提升软件兼容性。
以华硕Z690主板关闭12代处理器小核心为例。
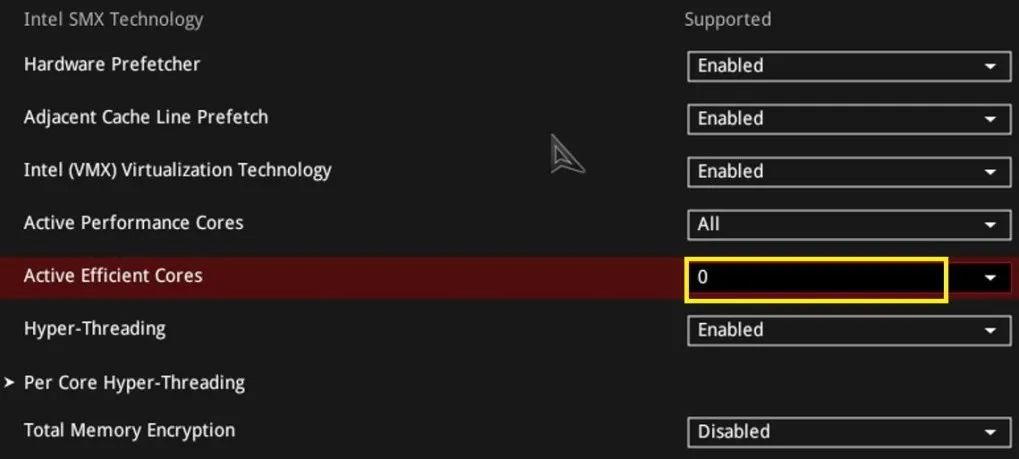
依次进入【BIOS】【Advanced】【CPU Configuration】

默认情况下大小核心都是开启的

将小核心数量设置为0即可关闭小核心
http://www.jcywtm.com/jgdp/2023/06/202306010003.png
注:没有相关选项即不支持关闭!
编程模式通过按键输入[5 位编程密码]+[*]+[0]+[#]进入编程状态。
默认编程密码为12345。进入编程状态后,绿灯快速闪烁。
输入[*]+[#]退出编程状态,进入普通状态。
{kind=link}