注:
1、摄像机支持通过GB/T 28181协议进行双平台注册,注册到多个平台时,如果多个平台同时向摄像机同步NTP服务器时间,会出现摄像机时间不连续的情况,建议仅保留一个平台向摄像机同步NTP服务器时间。
2、GB/T 28181协议支持MD5和SHA256摘要认证,MD5属于弱算法,存在安全风险。且信令流和媒体流均未加密,请在可信网络内使用该协议,否则可能存在安全风险。
3、使用GB/T 28181协议与平台对接时,需要获取平台侧添加摄像头时的参数,如设备ID。
4、通过GB/T 28181协议与平台对接,需确保摄像机的系统时间采用的是NTP校时。
配置方法如下:
登录摄像机的Web界面,选择“高级配置 > 系统配置 > 时间设置”页签,进入“时间设置”配置页面。
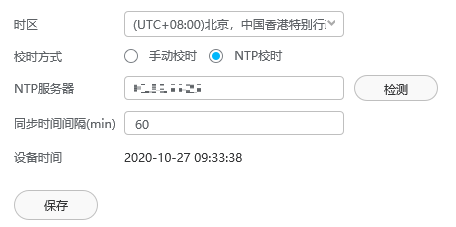
a、在“时区”中选择对应的城市时区。
b、选择校时方式为“NTP校时”。
c、设置NTP服务器。
如果对接的是单个安防平台,此处填写对应安防平台的IP地址。
如果对接的是集群,此处填写集群的浮动网关IP地址。
设置完成后,单击“保存”。
配置GB/T 28181协议参数
登录摄像机的Web界面,选择“高级配置 > 网络 > 平台对接参数”,系统显示“平台对接参数”页面。
选择“第二协议参数 > T28181”,勾选“媒体流保活开关”,配置“保活时间”,然后勾选“GB/T 28181”,启用GB/T 28181协议。
如果需要进行双平台注册,还需要选择“第二协议参数 > T28181-2”,配置另外一个平台的相关信息。仅T28181页签支持设置GB35114协议参数,T28181-2页签不支持设置GB35114协议参数。
注:不同机型的摄像头web界面参数略有差异,请以实际界面为准。
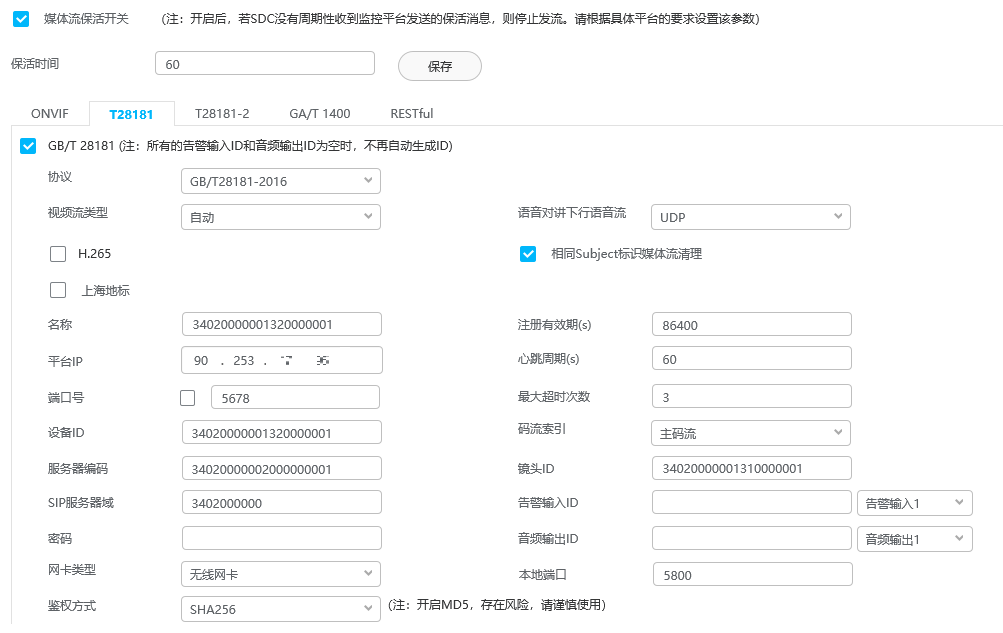
GB/T 28181协议参数说明
1、媒体流保活开关
启用“媒体流保活开关”,打勾表示已启用。
开启媒体流保活功能后,如果在一定时间内摄像机没有接收到安防平台发送的媒体保活包,则SDC停止发送媒体流。当平台支持保活功能时,建议启用。
2、保活时间
摄像机和安防平台媒体流保活连接的次数,单次保活时间为5s。例如,当保活次数为2时,媒体流保活时间则为2*5s即10s时间,10s内即使SDC没有收到媒体保活包也不会停止发送媒体流,超过10s没收到保活包即停止发送媒体流。
3、协议
下拉框选择协议类型。
说明:
当选择TCC-VMS-2020协议时,支持配置主备服务器。当主(备)服务器出现故障时,支持自动切换到备(主)服务进行重连注册。
4、视频流类型
下拉框选择视频流类型。
自动:根据平台的请求发送。
视频流:只发送视频流。
复合流:发送视频流和音频流。
5、语音对讲下行语音流
语音对讲下行语音流的协议类型,可以选择UDP或TCP。
注:
当摄像机与平台不在同一网段时,建议使用TCP。
6、H.265
勾选,表示通过GB/T 28181协议对接平台时,摄像机发送的视频流支持H.265和H.264两种编码协议。
不勾选,表示通过GB/T 28181协议对接平台时,摄像机发送的视频流仅支持H.264编码协议。
7、相同Subject标识媒体流清理
勾选:表示平台使用相同的SubjectID只能获取一股视频流。
不勾选:表示平台使用相同的SubjectID可以获取多股视频流。
注:
摄像机对接IVS平台时,请取消勾选此项。
8、上海地标
勾选,表示支持上海地标协议。
9、名称
注册到平台时所采用的登录名,可设置数字或其他字符,包括汉字。
10、平台IP
摄像机接入到IVS1800平台时,输入平台IP地址。
摄像机接入到IVS3800平台时,输入MPU对应的集群浮动网关IP地址。
如果服务器和摄像机在不同网络,且存在NAT,则配置为集群浮动网关的映射IP地址。
11、端口号
设备使用GB/T 28181协议对接到平台,平台侦听的设备的端口号默认为“5060”。
与华为安防平台对接时,请修改为“5080”。
勾选使能按钮后,已配置的端口需要在范围内。
注:
端口号可输入0~65535的整数。
12、设备ID
每台设备的ID唯一,输入1~64位字符(字母和数字),必须与平台配置的互联编码保持一致。
注:
必填,否则业务告警无法上报给平台。
摄像机接入华为的安防平台时,设备ID的第11到13位必须依次为“132”,且设备ID和镜头ID不能相同,否则会导致安防平台无法查看摄像机实况。
服务器编码
13、GB/T 28181服务器编码。输入1~64位数字。
注:
摄像机接入华为的安防平台时,服务器编码第11到13位必须依次为“200”。
14、SIP服务器域
域名,输入1~127位数字。
15、密码
设备注册到平台的密码。
注:
必须与平台配置的注册密码保持一致,以免造成对接失败。
密码相关要求请参见密码声明。
16、注册有效期
设备单次注册到平台的有效期限。默认为“86400s(一天)”。
注:
设备86400s(一天)内没有注册成功,表示本次注册失败,建议采用默认值。
设备在有效期到来前会重新向平台发起注册。
17、心跳周期
设备发送心跳信息的时间间隔。系统默认心跳周期为60s,建议采用默认值。
注:
摄像头与平台需配置统一的心跳周期。
18、最大超时次数
心跳信息连续超时达到“最大超时次数”,则认为摄像机无法与平台建立连接。
系统默认最大超时次数为3次,建议采用默认值。
注:
摄像头与平台需配置统一的最大超时次数。
19、码流索引
码流索引的类型,可以选择主码流或子码流,默认为主码流,建议采用默认值。
20、镜头ID
设备镜头的ID号。
注:
摄像机接入华为的安防平台时,镜头ID的第11到13位为“131”或者“132”,否则可能会导致安防平台无法查看实况。
21、告警输入ID
设备告警输入的ID。
注:
需要用户手动输入,要求第11到13位为“134”,否则会导致IVS平台无法正常上报告警。
22、音频输出ID
设备音频输出的ID。
注:
需要用户手动输入,要求第11到13位为“137”,否则会导致IVS平台无法正常传输上行/下行音频流。
23、网卡类型
选择摄像机与平台对接时使用的网络连接方式,根据现场实际情况选择。取值及含义如下:
有线网卡:通过网线等有线连接方式对接平台。
无线网卡:通过无线网络连接方式对接平台。
仅5G款型摄像机支持该方式。选择无线网卡方式,必须启用5G无线服务,具体请参见配置5G无线服务。
说明:
如果5G摄像机因SIM卡业务欠费后断网,在用户续费成功后1天将会自动恢复5G网络。
24、本地端口
连接SIP服务器时,摄像机端的端口号。
注:
本地端口可输入1024~65535的整数。
25、鉴权方式
SHA256:只支持SHA256鉴权方式。
MD5/SHA256:同时支持MD5和SHA256鉴权方式。
注:
MD5存在风险,请谨慎使用,建议使用SHA256鉴权方式。
需要与平台配置保持一致,否则会导致注册失败。
单击“保存”。
26、28181协议高级参数配置中的录像查询个数
28181协议对接中,录像查询时,报文单次携带的录像个数。
输入1~20的整数,默认为10。如果平台对报文大小有限制,可以适当进行调整。调整此配置会影响录像查询的速度,请根据实际需要进行调整。