常亮补光灯与相机的接线
注:
一台相机最多支持接入 5 台补光灯。
当一台相机配有多个补光灯时,需要设置补光灯参数和亮度。
如下图所示。
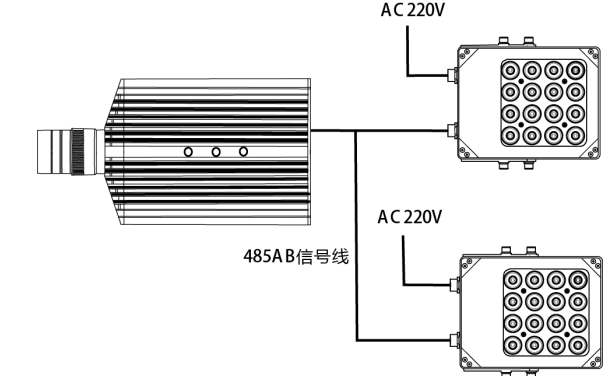
步骤1 将两个补光灯的 RS485_A(红线)并接,同时接入相机的 485_A 接口。
步骤2 将两个补光灯的 RS485_B(白线)并接,同时接入相机的 485_B 接口。
频闪补光灯与相机的接线
注:
一台相机最多支持接入 5 台补光灯进行级联。
当一台相机配有多个补光灯时,需要对视频同步补光。
如图 所示。
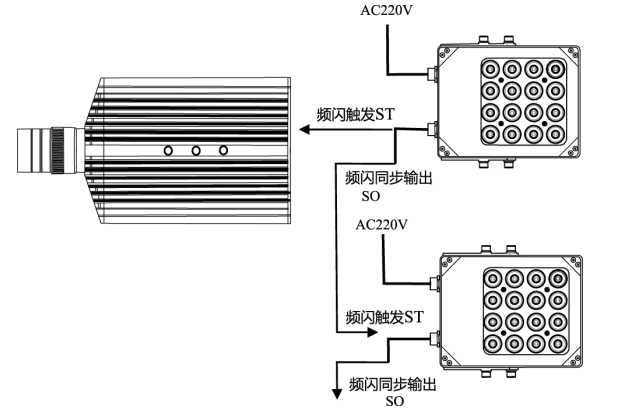
步骤1 第一台补光灯的频闪触发线 FLASH+(绿线)、FLASH-(灰线)连接到相机默认的频闪触发接口 F7+、F7-。
步骤2 第一台补光灯的频闪输出信号线 STOUT+(橙线)、STOUT-(棕线)连接到第二台补光灯的频闪触发线 FLASH+(绿线)、FLASH-(灰线)。
后面的补光灯以此类推,进行级联,完成频闪补光灯与相机的接线。
爆闪/频闪补光灯与相机接线
如下图:
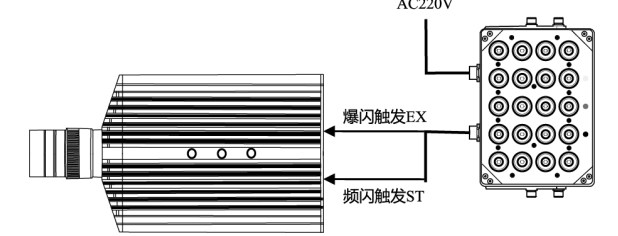
步骤1 补光灯的爆闪触发线 EX+(黄线)、EX-(蓝线)接入相机爆闪触发接口 F1+、F1-。
步骤2 补光灯频闪触发线 FLASH+(绿线)、FLASH-(灰线)接入相机频闪触发接口 F7+、F7-。
注:相机共有 7 个接口,其中 F1 至 F6 六个默认为爆闪灯接口,F7 默认为频闪接口。