RLDP(Rapid Link Detection Protocol,快速链路检测协议)是一种以太网链路故障检测协议,用于快速检测单向链路故障、双向链路故障以及下联环路故障。如果发现故障存在,RLDP会根据用户配置的故障处理方式自动关闭或通知用户手工关闭相关端口,以避免流量的错误转发或者防止以太网二层环路。
下面通过一个典型配置举例说明交换机如何配置RLDP。
配置需求
为了防止交换机端口出现环路,需要在交换机端口上配置RLDP功能。
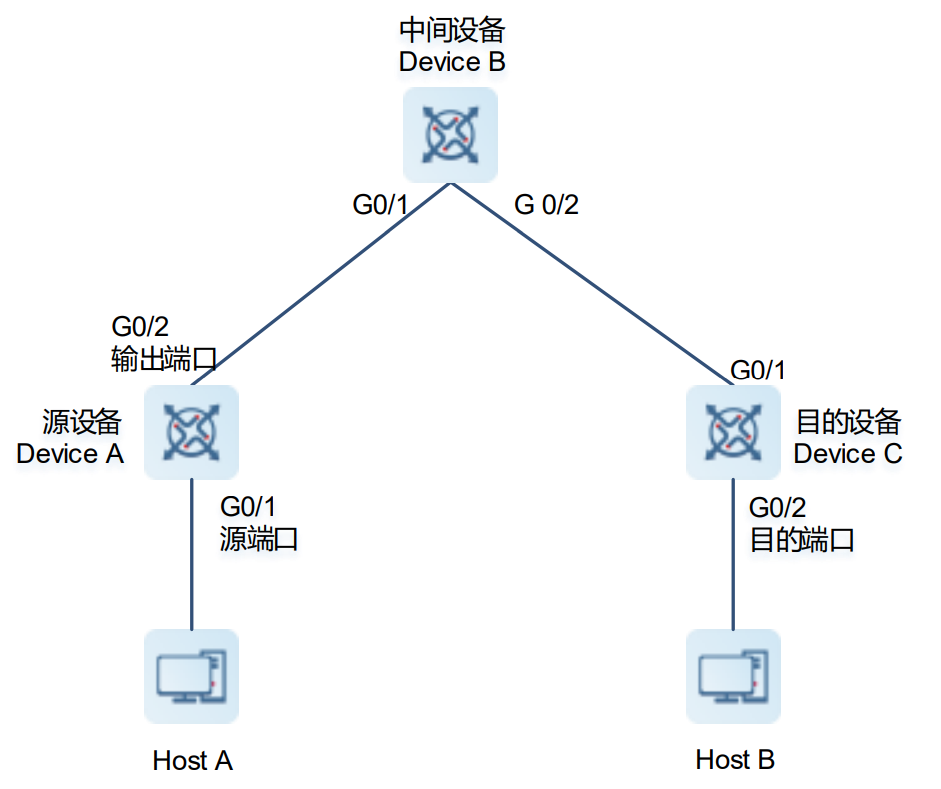
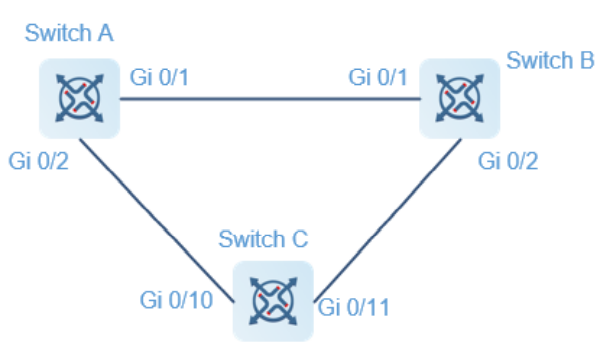
组网拓扑
配置要点
1、Switch A、Switch B作为汇聚,Switch C作为接入,Switch C下联可以接用户设备,三台设备组成环网拓扑,每台设备开启STP。
2、 Switch A开启RLDP,两个端口需要配置单向和双向链路检测,下联端口需要配置开启环路检测。
3、Switch B开启RLDP,两个端口需要配置单向和双向链路检测,下联端口需要配置开启环路检测。
4、 Switch C开启RLDP,上联两个端口需要配置单向和双向链路检测,下联两个端口转成trunk模式并且需要配
配置步骤
(1) 进入特权模式。
enable
(2) 进入全局配置模式。
configure terminal
(3) 开启全局RLDP检测功能。
rldp enable
缺省情况下,全局RLDP检测功能处于关闭状态。
(4) 进入二层以太网接口配置模式。
interface interface-type interface-number
(5) 配置接口的RLDP检测功能。
rldp port { bidirection-detect | loop-detect | unidirection-detect } { block | shutdown-port | shutdown�svi | warning }
参数说明如下:
○ bidirection-detect:双向链路检测。
○ loop-detect:环路检测。
○ unidirection-detect:单向链路检测。
○ block:关闭端口学习MAC地址和转发功能。
○ shutdown-port:关闭端口。
○ shutdown-svi:关闭端口所在SVI。
○ warning:发送告警。
缺省情况下,未配置端口RLDP检测。
(6) 配置接口的RLDP VLAN环路检测功能。
rldp port vlan-loop-detect { isolate-vlan | warning } vlan vlan-list
参数说明如下:
○ isolate-vlan:隔离环路VLAN。
○ warning:警告处理。
○ vlan-list:开启VLAN环路检测以及检测到环路后生效环路防护测量的VLAN集合。可以包含一个或多个
VLAN,当配置多个VLAN时,VLAN ID间用逗号隔开,连续的VLAN ID还可使用“-”头尾连接,无大小顺序要求。
缺省情况下,未配置接口的RLDP检测功能。
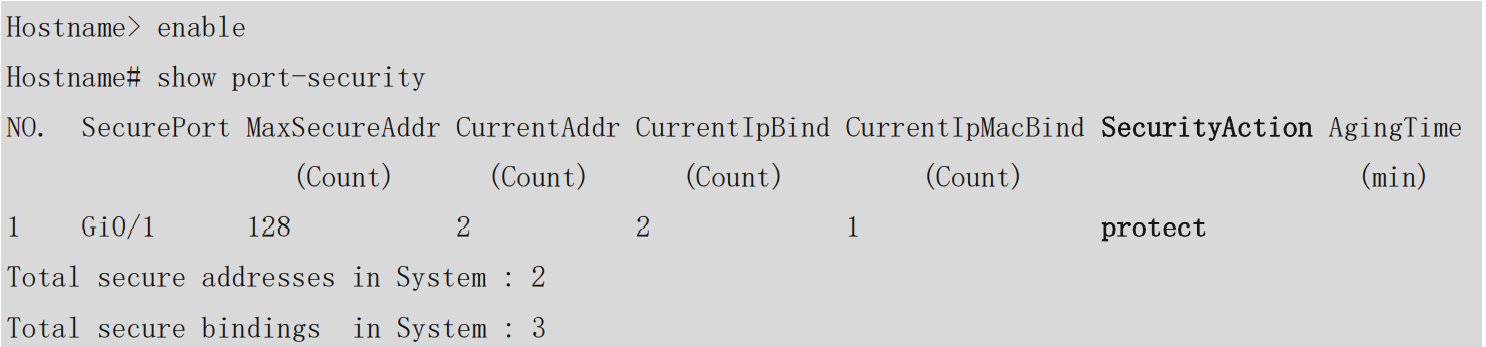
查看配置结果
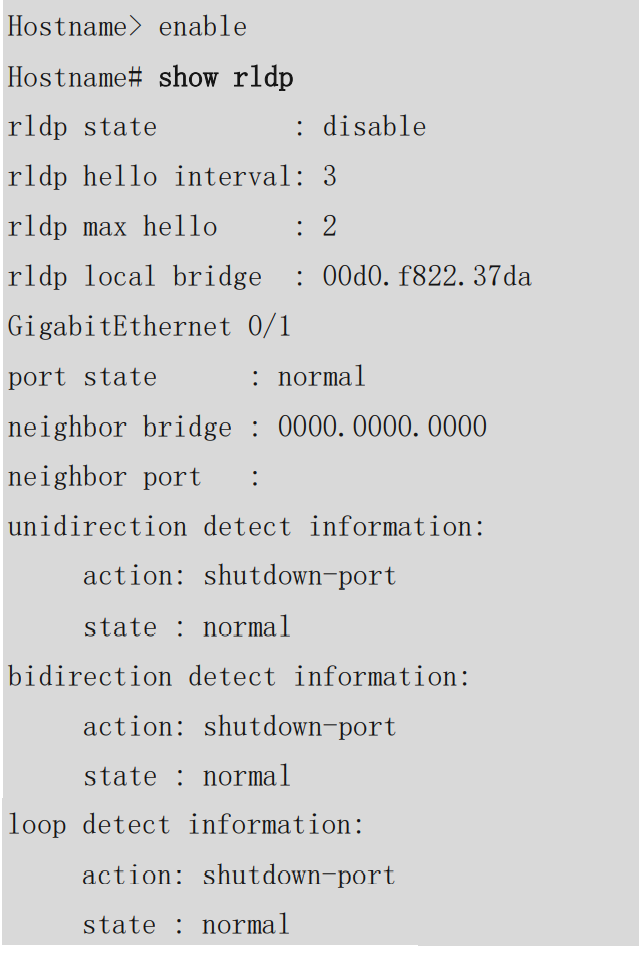
# 使用show rldp命令查看RLDP运行状态。
show rldp 命令输出信息说明
rldp state
全局RLDP功能状态:
enable:表示开启
disable:表示关闭
rldp hello interval
端口发送RLDP报文的时间间隔,单位为秒
rldp max hello
RLDP最大探测次数
rldp local bridge
本地系统MAC地址,用于区分本地设备与邻居设备
port state
端口状态:
error:表示链路异常
normal:表示链路正常
neighbor bridge
邻居系统MAC地址,用于区分本地设备与邻居设备
neighbor port
邻居设备与本端设备连接的端口
unidirection detect information
单向链路检测信息
bidirection detect information
双向链路检测信息
loop detect information
环路检测信息
action
检测到链路异常后的处理策略
state
端口RLDP检测状态:
error:表示链路异常
normal:表示链路正常
rldp state
全局RLDP功能状态:
enable:表示开启
disable:表示关闭
rldp hello interval
端口发送RLDP报文的时间间隔,单位为秒
rldp max hello
RLDP最大探测次数
rldp local bridge
本地系统MAC地址,用于区分本地设备与邻居设备