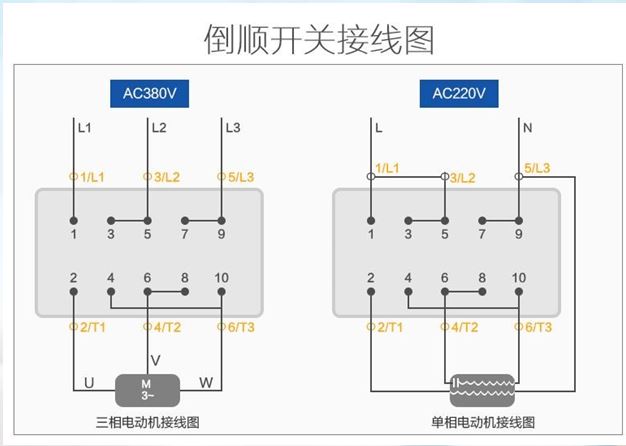
接三相电机:135进,246出
接单相电机:把1,3接火线,5接零线,把电机上面接线柱联接片取掉,有四个接线柱,找出电机主绕组接2根线把其中一根线接到开关的2号接线柱上,另一根接到5号接线柱上,剩下的两个带电容的接线柱接两根线,把其中一根接到开关的4号线上,另一根接到6号接线柱上。


接三相电机:135进,246出
接单相电机:把1,3接火线,5接零线,把电机上面接线柱联接片取掉,有四个接线柱,找出电机主绕组接2根线把其中一根线接到开关的2号接线柱上,另一根接到5号接线柱上,剩下的两个带电容的接线柱接两根线,把其中一根接到开关的4号线上,另一根接到6号接线柱上。
单门控制器:
拨码开关1、3拨到ON,断电重启听到滴一声后再拨回来
双门/四门控制器
拨码开关1、3、5拨到ON,断电重启听到滴一声后再拨回来
一、 组网需求
Device A、B、C之间通过OSPF路由协议互联。
Device B作为ABR传递OSPF区域间路由,Device C作为ASBR引入了外部静态路由。
为减少Area 1内LSA数量,节约设备性能,Area 1配置成NSSA区域。
二、组网图

三、 配置要点
●所有设备配置接口IP地址(略)。
●所有设备配置OSPF基本功能(略)。
● Device C上需要将外部静态路由引入OSPF进程。
● 需要分别在Device B、C上将区域1配置成NSSA。
四、 配置步骤
(1) Device C配置静态路由。
Device C> enable
Device C# configure terminal
Device C(config)# ip route 172.10.10.0 255.255.255.0 192.168.6.2
(2) Device C上配置引入外部静态路由。
Device D(config)# router ospf 1
Device D(config-router)# redistribute static subnets
(3) Device B、C上区域1配置成NSSA。
# Device C的配置。
Device B> enable
Device B# configure terminal
Device B(config)# router ospf 1
Device B(config-router)# area 1 nssa
# Device C的配置。
Device C(config-router)# area 1 nssa
五、验证配置结果
# Device C上查看生成172.10.10.0/24的7类LSA。
Device D# show ip ospf database nssa-external

# Device B上查看172.10.10.0/24同时存在5类和7类LSA。
Device B# show ip ospf database nssa-external

# Device B上查看生成了172.10.10.0/24的N2类型的路由。
Device B# show ip ospf database external

六、配置文件
●Device B的配置文件。
!
router ospf 1
area 1 nssa
!
● Device D的配置文件。
!
ip route 172.10.10.0 255.255.255.0 192.168.6.2
!
router ospf 1
redistribute static subnets
area 1 nssa
!
七、常见错误
● 同一区域中的设备,区域类型配置不一致。
● 在Stub区域中配置路由重分布,将无法加入外部路由。
一、 组网需求
Device A、B、C和D之间通过OSPF路由协议互联。
Device A和Device B作为ABR传递OSPF区域间路由,Device D作为ASBR引入外部静态路由。
为减少Area 1内LSA数量,节约设备性能,将Area 1配置成Totally Stub区域。
二、组网图

三、 配置要点
● 所有设备配置接口IP地址(略)。
● 所有设备配置OSPF基本功能(略)。
● 在Device A和Device C上配置区域1为Stub类型。
四、 配置步骤
(1) Device D上配置引入外部静态路由。
Device D> enable
Device D# configure terminal
Device D(config)# router ospf 1
Device D(config-router)# redistribute static subnets
(2) Device A、C上区域1配置成Stub类型。
# Device A的配置。
Device A> enable
Device A# configure terminal
Device A(config)# router ospf 1
Device A(config-router)# area 1 stub no-summary
# Device C的配置。
Device C> enable
Device C# configure terminal
Device C(config)# router ospf 1
Device C(config-router)# area 1 stub
五、验证配置结果
●Device A的配置文件
!
router ospf 1
area 1 stub no-summary
!
● Device C的配置文件。
!
router ospf 1
area 1 stub
!
●Device D的配置文件。
!
router ospf 1
redistribute static subnets
!
一、 组网需求
所有的设备都运行OSPF,一共划分3个区域,Device A和Device B作为ABR转发区域间路由,以此实现所有网络的互
联互通。配置完成后,所有设备都能学习到自治系统内的所有网段的路由,并且邻居关系正确。
二、组网图

三、 配置要点
● 在所有设备上配置接口IP地址。
● 在所有设备上启动IPv4单播路由功能(该功能默认已开启)。
● 在所有设备上配置OSPF实例、Router ID。
● 在所有设备上配置接口配置OSPF。
四、 配置步骤
(1) 在所有设备上配置接口IP地址。
# Device A的配置。
Device A> enable
Device A# configure terminal
Device A(config)# interface gigabitethernet 0/1
Device A(config-if-GigabitEthernet 0/1)# ip address 192.168.1.1 255.255.255.0
Device A(config-if-GigabitEthernet 0/1)# exit
Device A(config)# interface gigabitethernet 0/2
Device A(config-if-GigabitEthernet 0/2)# ip address 192.168.2.1 255.255.255.0
Device A(config-if-GigabitEthernet 0/2)# exit
# Device B的配置。
Device B> enable
Device B# configure terminal
Device B(config)# interface gigabitethernet 0/1
Device B(config-if-GigabitEthernet 0/1)# ip address 192.168.1.2 255.255.255.0
Device B(config-if-GigabitEthernet 0/1)# exit
Device B(config)# interface gigabitethernet 0/2
Device B(config-if-GigabitEthernet 0/2)# ip address 192.168.3.1 255.255.255.0
Device B(config-if-GigabitEthernet 0/2)# exit
# Device C的配置。
Device C> enable
Device C# configure terminal
Device C(config)# interface gigabitethernet 0/3
Device C(config-if-GigabitEthernet 0/3)# ip address 192.168.2.2 255.255.255.0
Device C(config-if-GigabitEthernet 0/3)# exit
# Device D的配置。
Device D> enable
Device D# configure terminal
Device D(config)# interface gigabitethernet 0/3
Device D(config-if-GigabitEthernet 0/3)# ip address 192.168.3.2 255.255.255.0
Device D(config-if-GigabitEthernet 0/3)# exit
(2) 配置OSPF实例、Router ID,并将接口地址加入OSPF。
# Device A的配置。
Device A(config)# router ospf 1
Device A(config-router)# router-id 192.168.1.1
Device A(config-router)# network 192.168.1.0 0.0.0.255 area 0
Device A(config-router)# network 192.168.2.0 0.0.0.255 area 1
# Device B的配置。
Device B(config)# router ospf 1
Device B(config-router)# router-id 192.168.1.2
Device B(config-router)# network 192.168.1.0 0.0.0.255 area 0
Device B(config-router)# network 192.168.3.0 0.0.0.255 area 2
# Device C的配置。
Device C(config)# router ospf 1
Device C(config-router)# router-id 192.168.2.2
Device C(config-router)# network 192.168.2.0 0.0.0.255 area 1
# Device D的配置。
Device D(config)# router ospf 1
Device D(config-router)# router-id 192.168.3.2
Device D(config-router)# network 192.168.3.0 0.0.0.255 area 2
五、验证配置结果
(1) 检查Device A的OSPF邻居和路由。
# Device A的OSPF路由。
Device A# show ip route ospf
![]()
# Device A的邻居信息。
Device A# show ip ospf neighbor

(2) 检查Device B的OSPF邻居和路由。
# Device B的OSPF路由。
Device B# show ip route ospf
![]()
# Device B的邻居信息。
Device B# show ip ospf neighbor

(3) 检查Device C的OSPF邻居和路由。
# Device C的OSPF路由。
Device C# show ip route ospf

# Device C的邻居信息。
Device C# show ip ospf neighbor

(4) 检查Device D的OSPF邻居和路由。
# Device D的OSPF路由。
Device D# show ip route ospf

# Device D的邻居信息。
Device D# show ip ospf neighbor

(5) 在Device D上检测到地址192.168.2.2的网络可达性。
Device D# ping 192.168.2.2

六、配置文件
●Device A的配置文件。
!
interface gigabitethernet 0/1
ip address 192.168.1.1 255.255.255.0
!
interface gigabitethernet 0/2
ip address 192.168.2.1 255.255.255.0
!
router ospf 1
router-id 192.168.1.1
network 192.168.1.0 0.0.0.255 area 0
network 192.168.2.0 0.0.0.255 area 1
!
● Device B的配置文件。
!
interface gigabitethernet 0/1
ip address 192.168.1.2 255.255.255.0
!
interface gigabitethernet 0/2
ip address 192.168.3.1 255.255.255.0
!
router ospf 1
router-id 192.168.1.2
network 192.168.1.0 0.0.0.255 area 0
network 192.168.3.0 0.0.0.255 area 2
!
●Device C的配置文件。
!
interface gigabitethernet 0/3
ip address 192.168.2.2 255.255.255.0
!
router ospf 1
router-id 192.168.2.2
network 192.168.2.0 0.0.0.255 area 1
!
● Device D的配置文件。
!
interface gigabitethernet 0/3
ip address 192.168.3.2 255.255.255.0
!
router ospf 1
router-id 192.168.3.2
network 192.168.3.0 0.0.0.255 area 2
!
七、常见错误
●IP单播路由功能被关闭,OSPF协议无法启用。
● network命令配置的网段范围未包含接口IP地址。
●相连接口配置的Area ID不一致。
●多台设备上配置了相同的Router ID,导致Router ID冲突。
●多台设备上配置了相同的接口IP地址,导致OSPF网络运行错误。
功能说明
策略路由(Policy-Based Routing)是基于策略的路由。将包含策略的路由图应用在接口和设备上,即可实现策略路由。
与静态路由相似,策略路由也是手工配置的路由,不能随网络变化自动更新,仅在本地有效。与静态路由、动态路由相比,策略路由更加灵活。静态路由、动态路由只能依据目的地址转发报文。策略路由可以依据源地址、目的地址、报文长度、入端口等转发报文。
应用场景
1、应用场景一:
当您的网络中的汇聚与核心设备,或者是核心与出口路由器之间有多条链路互联时,普通路由表的负载或者主备的结果可能无法满足您的需求,又或者您的网络中引人了一些新的业务,这些网段在您原先的网络设计时没有考虑到,此时出现新的路由访问的需要,您不想去调整前期规划的复杂的OSPF路由控制选路的策略,此时就可以利用策略路由这种技术来针对这部分新的需求进行一个重新的路由选择,可以按照您的意愿选择一条指定的链路转发数据,而不依赖于传统的路由表。
2、应用场景二:
核心到网络出口设备有多台路由器或者防火墙,他们对应的多家不同的运营商链路,比如电信(100M),联通 (50M),教育网(1G)等,此时您希望根据每台链路的负载程度,带宽利用率等情况来将内网中的流量分流到这三条链路上,比如各教学楼,科研所,教师办公区的用户上网全部走教育网出口,图书馆、电教中心、学校行政楼的区域上网全部走联通,其他流量(比如学生宿舍区)全部都走电信,另外访问教育网资源的数据全部走教育网出口。基于上面的业务类型进行分流,同时电信,联通,教育网又彼此作为各自的链路故障时候的备份,如果您有这样的组网需求,就可以考虑采用策略路由进行选路。
下面通过一个典型策略路由配置举例来说明如何配置策略路由。
组网需求
在设备Device上配置策略路由,实现如下目的:
来自Host A(200.24.16.2/24)的报文,优先从GigabitEthernet 0/1接口发出。
来自Host B(200.24.17.2/24)的报文,优先从GigabitEthernet 0/2接口发出。
两条出口链路互为备份,配置与Track联动,故障时能够快速切换备份链路。
配置要点
1、配置两个不同的ACL,分别用来匹配Host A网段和Host B网段。
2、配置路由图RM_FOR_PBR:策略10实现“来自Host A网段的报文,优先从GigabitEthernet 0/1接口发出”;策略20实现“来自Host B网段的报文,优先从GigabitEthernet 0/2接口发出”。
3、 设置策略路由在多个下一跳之间实现冗余备份。
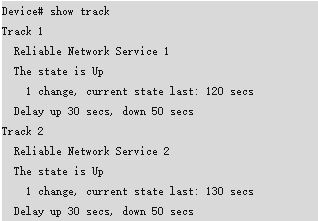
4、设置Track规则,并与策略路由联动。
5、配置策略路由,对GigabitEthernet 0/3接口收到的报文应用路由图RM_FOR_PBR。
配置限制与指导
1、 配置策略路由时必须引用路由图。因此,必须在设备上配置路由图。
2、如果配置路由图时引用了ACL,则必须在设备上配置ACL。
3、如果策略路由中引用的路由图实际不存在,则此策略路由不生效。
配置步骤
# 配置接口IP,实现网络互通。(略)
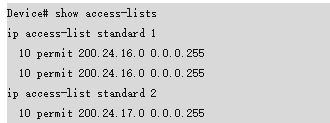
# 配置ACL规则,分别匹配网段200.24.16.0/24和200.24.17.0/24。
Device> enable
Device# configure terminal
Device(config)# access-list 1 permit 200.24.16.0 0.0.0.255
Device(config)# access-list 2 permit 200.24.17.0 0.0.0.255
# 配置track规则。
Device(config)# ip rns 1
Device(config-ip-rns)# icmp-echo 200.24.18.1
Device(config-ip-rns)# exit
Device(config)# ip rns schedule 1 start-time now life forever
Device(config)# track 1 rns 1
Device(config)# ip rns 2
Device(config-ip-rns)# icmp-echo 200.24.19.1
Device(config-ip-rns)# exit
Device(config)# ip rns schedule 2 start-time now life forever
Device(config)# track 2 rns 2
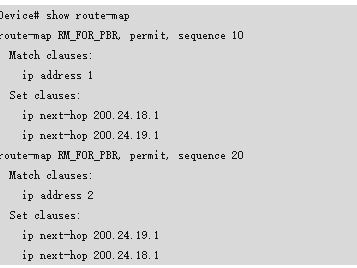
# 配置路由策略RM_FOR_PBR,200.24.16.0的下一跳为200.24.18.1,备份下一跳为200.24.19.1;200.24.17.0的下一跳为200.24.19.1,备份下一跳为200.24.18.1。
Device(config)# route-map RM_FOR_PBR 10
Device(config-route-map)# match ip address 1
Device(config-route-map)# set ip next-hop verify-availability 200.24.18.1 track 1
Device(config-route-map)# set ip next-hop verify-availability 200.24.19.1 track 2
Device(config-route-map)# exit
Device(config)# route-map RM_FOR_PBR 20
Device(config-route-map)# match ip address 2
Device(config-route-map)# set ip next-hop verify-availability 200.24.19.1 track 2
Device(config-route-map)# set ip next-hop verify-availability 200.24.18.1 track 1
Device(config-route-map)# exit
# 接口0/3上生效路由图RM_FOR_PBR,并开启负载均衡选路。
Device(config)# interface GigabitEthernet 0/3
Device(config-if-GigabitEthernet 0/3)# ip policy route-map RM_FOR_PBR
Device(config-if-GigabitEthernet 0/3)# exit
Device(config)# ip policy redundance
验证配置结果
# 检查策略路由配置信息,确认接口上应用了路由图。

# 检查路由图配置信息,确认策略规则。
# 检查ACL配置信息,确认报文过滤规则。
# 检查Track的跟踪对象是否Up。
静态路由由网络管理员手工配置。配置静态路由后,路由表中生成一条静态路由。使用静态路由,转发去远端网络的报文。简单网络中,通过手工配置IPv6静态路由可以实现网络互通。下面通过一个典型举例来说明如何配置IPv6静态路由。
配置要点
1、 配置交换机SW1接口IP
2、 配置交换机SW2接口IP
3、配置交换机SW1静态路由
4、 配置交换机SW2静态路由
5、 保存配置
配置限制与指导
1、二层交换机不能配置本功能。
2、 三层交换机若配置了no ipv6 unicast- routing,则不能配置IPv6静态路由,之前已经存在的IPv6静态路由也会被删除。在未重启的情况下,重新配置ipv6 unicast- routing,可以恢复被清空的IPv6静态路由。重启过后,则无法恢复这些IPv6静态路由。
配置步骤
# 配置交换机SW1接口IP。
SW1> enable
SW1# configure terminal
SW1(config)# interface fastethernet 0/1
SW1(config-if-GigabitEthernet 0/1)# no switchport
SW1(config-if-GigabitEthernet 0/1)# ipv6 address 2001::1/64
SW1(config-if-GigabitEthernet 0/1)# interface GigabitEthernet 0/25
SW1(config-if-GigabitEthernet 0/2))# no switchport
SW1(config-if-GigabitEthernet 0/2))# ipv6 address 2003::1/64
SW1(config-if-GigabitEthernet 0/2))# exit
# 配置交换机SW2接口IP。
SW2> enable
SW2# configure terminal
SW2(config)# interface fastethernet 0/1
SW2(config-if-GigabitEthernet 0/1)# no switchport
SW2(config-if-GigabitEthernet 0/1)# ip address 2002::1/64
SW2(config-if-GigabitEthernet 0/1)# interface GigabitEthernet0/25
SW2(config-if-GigabitEthernet 0/2))# no switchport
SW2(config-if-GigabitEthernet 0/2))# ip address 2003::2/64
SW2(config-if-GigabitEthernet 0/2))# exit
# 配置交换机SW1静态路由,目的地址是2002::/64的数据包,转发给2003::2/64。
SW1(config)# ipv6 route 2002::/64 2003::2
# 配置交换机SW2静态路由,目的地址是2001::/64的数据包,转发给2003::1/64。
SW2(config)# ipv6 route 2001::/64 2003::1
验证配置结果
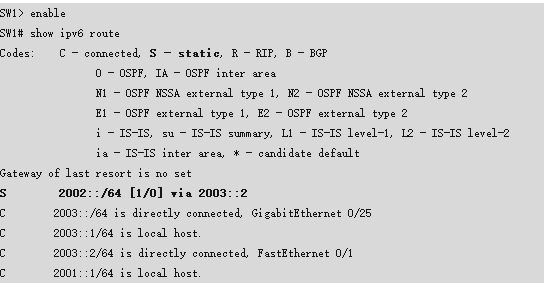
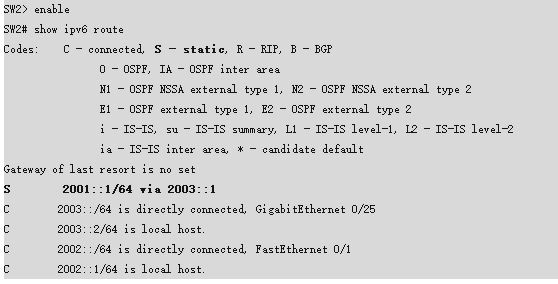
使用show ipv6 route检查设备的路由表,确认有静态路由条目。
#SW1的路由表
#SW2的路由表
静态路由由网络管理员手工配置。配置静态路由后,路由表中生成一条静态路由。使用静态路由,转发去远端网络的报文。简单网络中,通过手工配置IPv4静态路由可以实现网络互通。下面通过一个典型举例来说明如何配置IPv4静态路由。
配置要点
1、 配置交换机SW1接口IP
2、 配置交换机SW2接口IP
3、配置交换机SW1静态路由
4、 配置交换机SW2静态路由
5、 保存配置
配置限制与指导
1、二层交换机不能配置本功能。
2、三层交换机若配置了no ip routing,则不能配置IPv4静态路由,之前已经存在的IPv4静态路由也会被删除。在未重启的情况下,重新配置ip routing,可以恢复被清空的IPv4静态路由。重启过后,则无法恢复这些IPv4静态路由。
配置步骤
# 配置交换机SW1接口IP。
SW1> enable
SW1# configure terminal
SW1(config)# interface GigabitEthernet 0/1
SW1(config-if-GigabitEthernet 0/1)# no switchport
SW1(config-if-GigabitEthernet 0/1)# ip address 192.168.1.254 255.255.255.0
SW1(config-if-GigabitEthernet 0/1)# interface GigabitEthernet 0/2
SW1(config-if-GigabitEthernet 0/2))# no switchport
SW1(config-if-GigabitEthernet 0/2))# ip address 192.168.3.1 255.255.255.0
SW1(config-if-GigabitEthernet 0/2))# exit
# 配置交换机SW2接口IP。
SW2> enable
SW2# configure terminal
SW2(config)# interface GigabitEthernet 0/1
SW2(config-if-GigabitEthernet 0/1)# no switchport
SW2(config-if-GigabitEthernet 0/1)# ip address 192.168.2.254 255.255.255.0
SW2(config-if-GigabitEthernet 0/1)# interface GigabitEthernet0/25
SW2(config-if-GigabitEthernet 0/2))# no switchport
SW2(config-if-GigabitEthernet 0/2))# ip address 192.168.3.1 255.255.255.0
SW2(config-if-GigabitEthernet 0/2))# exit
# 配置交换机SW1静态路由,目的地址是192.168.2.0/24的数据包,转发给192.168.3.2。
SW1(config)# ip route 192.168.2.0 255.255.255.0 192.168.3.2
# 配置交换机SW2静态路由,目的地址是192.168.1.0/24的数据包,转发给192.168.3.1。
SW2(config)# ip route 192.168.1.0 255.255.255.0 192.168.3.1
验证配置结果
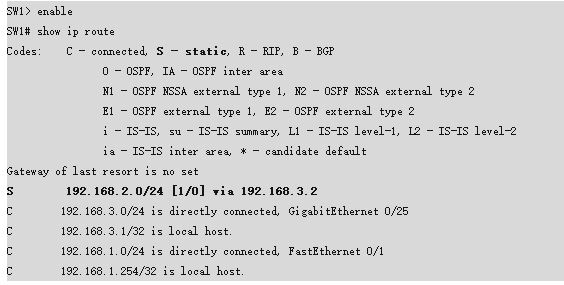
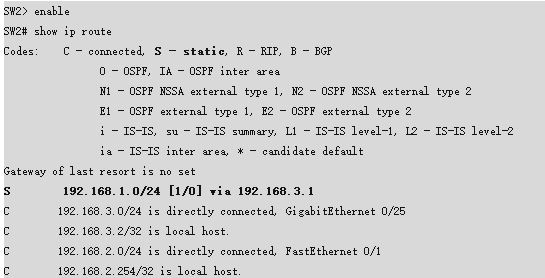
使用show ip route检查设备的路由表,确认有静态路由条目。
#SW1的路由表
#SW2的路由表
1、在二层设备上,通过ip default-gateway指定IPv4默认路由。在数据交互时,将目的地址非本地网段的报文投送到默认网关上,由网关路由器完成下一步的路由选路,达到二层设备与其他网络的网络互通。
# 配置默认网关为192.168.1.1。
Hostname> enable
Hostname# configure terminal
Hostname(config)# ip default-gateway 192.168.1.1
# 使用show ip redirects命令查看本设备的默认网关。
Hostname> enable
Hostname# show ip redirects
Default Gateway: 192.168.1.1
2、三层交换设备以及路由设备上,通过配置缺省网关,在路由选路无法命中精确路由时,将非本地的报文投送到缺省网关上,由网关路由器完成下一步的路由选路,完成本设备与其他网络的网络互通。
# 配置缺省网络为200.200.200.0,只要当200.200.200.0出现在路由表中,该路由才会成为缺省路由。
Hostname> enable
Hostname# configure terminal
Hostname(config)# ip default-network 200.200.200.0
# 使用show ip route命令查看本设备缺省路由。

1、创建VLAN
在全局配置模式下,通过vlan { vlan-id | range vlan-range }命令创建普通静态VLAN,进入VLAN配置模式。
vlan-range可以包含一个或多个VLAN,当配置多个VLAN时,VLAN ID间用逗号隔开,连续的VLAN ID还可使用“-”头尾连接,无大小顺序要求。
# 创建VLAN 10,并进入VLAN 10的配置模式。
Hostname> enable
Hostname# configure terminal
Hostname(config)# vlan 10
Hostname(config-vlan)#
# 创建一组VLAN。
Hostname> enable
Hostname# configure terminal
Hostname(config)# vlan range 20,3,5,7-9,15-11
Hostname(config-vlan-range)#
2、配置VLAN名称
在VLAN配置模式下,通过name vlan-name命令配置VLAN名称。
# 配置VLAN 10的名称为office 10。
Hostname> enable
Hostname# configure terminal
Hostname(config)# vlan 10
Hostname(config-vlan)# name office 10
3、配置VLAN接口的IP地址
在SVI接口配置模式下,通过ip address ipv4-address { mask | mask-length }命令配置SVI接口的IP地址。
# 进入VLAN 10的SVI接口配置模式,配置SVI接口的IP地址。
Hostname> enable
Hostname# configure terminal
Hostname(config)# interface vlan 10
Hostname(config-if-VLAN 10)# ip address 10.10.29.1 255.255.255.0
4、将接口添加到指定VLAN
在二层以太网接口配置模式/二层聚合接口配置模式下,通过switchport mode access命令配置二层接口为Access口,通过switchport access vlan vlan-id命令配置Access口加入指定VLAN。
在VLAN配置模式下,通过add interface { interface-type interface-number | range interface-type interface-range }命令配置Access口加入本VLAN。
# 配置二层以太网接口为Access口并加入VLAN 2。(接口配置模式)
Hostname> enable
Hostname# configure terminal
Hostname(config)# interface gigabitethernet 0/1
Hostname(config-if-GigabitEthernet 0/1)# switchport
Hostname(config-if-GigabitEthernet 0/1)# switchport mode access
Hostname(config-if-GigabitEthernet 0/1)# switchport access vlan 2
# 配置二层以太网接口为Access口并加入VLAN 10。(VLAN配置模式)
Hostname> enable
Hostname# configure terminal
Hostname(config)# interface gigabitethernet 0/1
Hostname(config-if-GigabitEthernet 0/1)# switchport
Hostname(config-if-GigabitEthernet 0/1)# switchport mode access
Hostname(config-if-GigabitEthernet 0/1)# exit
Hostname(config)# vlan 10
Hostname(config-vlan)# add interface gigabitethernet 0/1
Hostname(config-vlan)# end
5、清除VLAN接口的IP地址
在SVI接口配置模式下,通过no ip address [ ipv4-address { mask | mask-length }命令清除VLAN接口的IP地址。
# 进入VLAN 2的SVI接口配置模式,清除SVI接口的IP地址。
Hostname> enable
Hostname# configure terminal
Hostname(config)# interface vlan 2
Hostname(config-if-VLAN 2)# no ip address
配置不同VLAN间进行通信,请参阅 :
锐捷网管交换机配置不同VLAN间进行通信的操作方法