检查设备是否安装正确
①检查电池是否安装,电池外面的塑料皮是否剥除。
②设备后盖是否旋住。
③需检查设备是否插卡或卡是否太松,脱落。
设备确认安装正常
①重新上电查看平台是否上线。
a.设备嘀嘀两声闪绿灯,平台在线。则为安装操作问题。
b.设惫顺点长鸣红灯,则需要进一步的信号查询排查。
②按三秒自检键进入信号查询状态。
a.十几秒闪红灯。卡松要么没插卡,需检查设备是否插卡和境加贴。(注:设备生产日期为2019/9之前的设备,信号查询没有反应)
b.30-40秒闪红灯。信号不好,需进一步排查。
c.60秒之后闪红灯。需要测量烟感电池电压和阻抗。
③测量烟感的电池电压和阻抗
a.阻抗低(<10KQ),池患压低(<2.6V)。为阻抗有问题,需要走焦后跟换设备。
b.阻抗正常(>10KQ),电池电压在2.6V-2.9V之间。疑似移动离线问题。
c.阻抗正常(>10KQ),电池电压低(<2.6V)。按键死循环问题。
注:设备生产日期为2019/9之前的设备,有可能进入按键死循环但再次按自检设备会恢复正常。

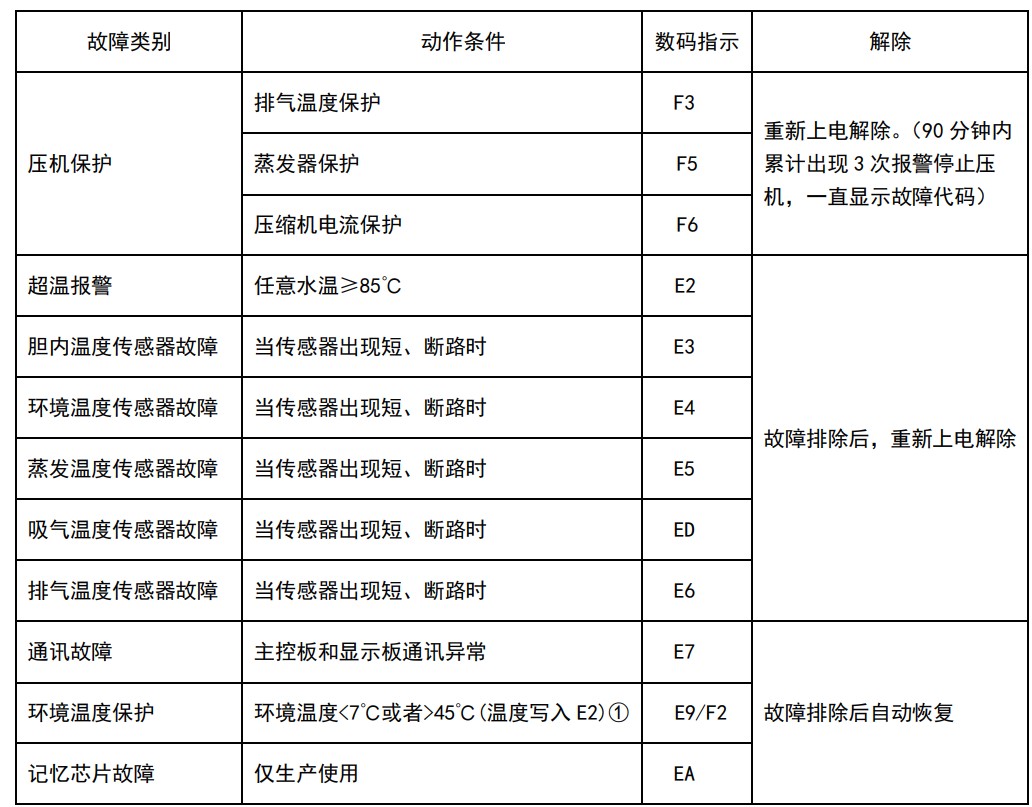
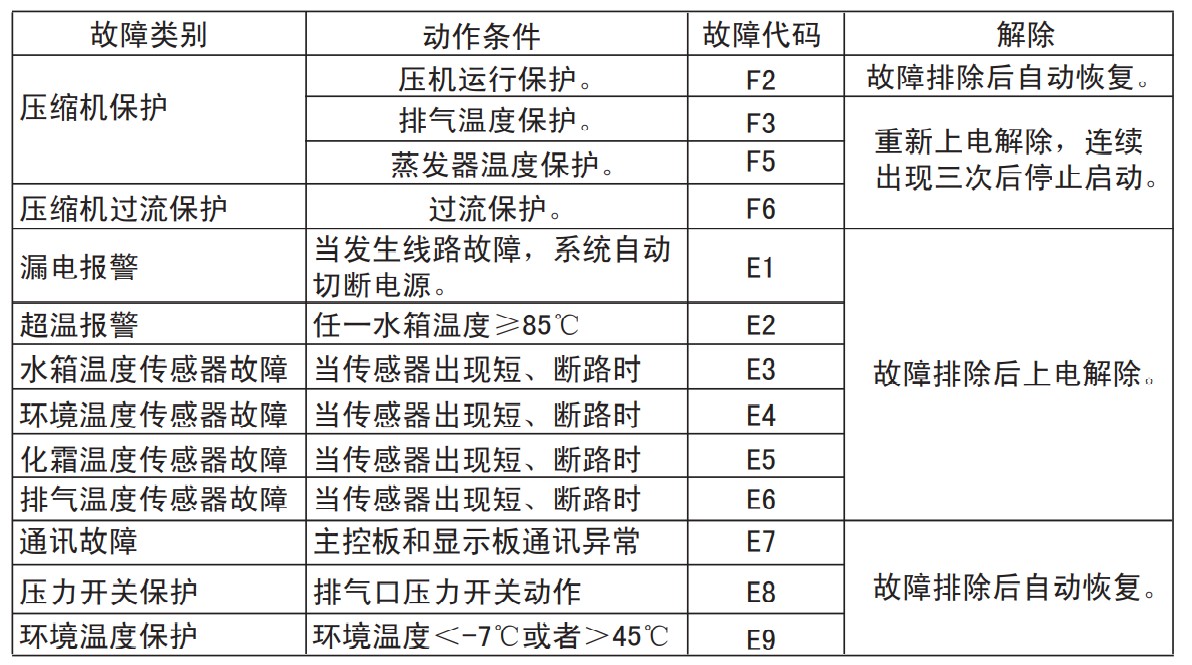
 故障代码及处理方法
故障代码及处理方法